You are here
Back to topLow Reynolds Number Dynamics of Microfilaments for Artificial Swimming Applications (Paperback)
$30.99
Special Order
Description
Swimming is the practise of fluid mobility in living or inanimate objects. An energy source, a way for the body to move, and an interaction between the body and the fluid are three essential elements required to make it happen. However, macro-scale species like people, birds, and insects, as well as micro-scale creatures like sperm, E. coli, and paramecium, have quite different swimming mechanics. The balance between the inertial and viscous forces acting on a fluid is determined by the Reynolds number, which distinguishes one fluid from another. In the high Reynolds number zone, inertial forces dominate macro-scale swimming, enabling motion by overcoming viscous drag.However, low Reynolds number swimming necessitates a different approach because the swimmer must use non-reciprocal body undulation and anisotropy in viscous drag to overcome the viscous drag for net propulsive thrust. Low Reynolds number swimming has lately received increased attention due to its potential for the creation of smart drug delivery systems, in-vivo biosensing, and the disentanglement of nanofibers.
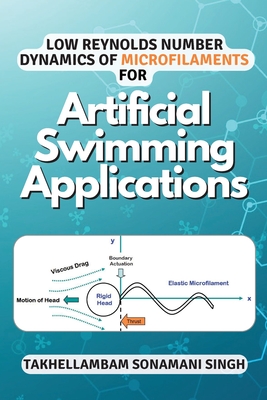
The design, actuation, and navigation control of flagellated microswimming are examined in this thesis. A flexible microswimmer model is composed of a rigid head attached to a thin, elastic filament, or tail, which produces propulsion through periodic flapping. The filament can be actuated either through dispersed actuation along the filament body or boundary activation at the head-tail junction. The elastohydrodynamics of microswimming, which combines the hydrodynamic interaction between the filament and fluid with elastic vibrations of the filament, governs the dynamics of the swimmer. The fundamental physics of microswimming are now better understood thanks to a recent upsurge in theoretical and experimental study, which has improved energy-efficient propulsion, navigation control, and biocompatibility.